
通用机器人的终极目标是在开放世界中自主完成复杂任务,这要求机器人不仅能“看见”世界,更能“理解”并与世界“交互”。
大晓机器人与南洋理工大学刚刚联合发布全球首个统一物理3D生成框架PhysX-Omni,其作为ACE研发范式下的最新成果,为机器人构建物理世界的全局认知与交互能力提供了重要潜力。
研究团队从机器人的长期发展需求出发,确立了“从物体级生成到场景级世界建模”的递进式研究路线,在实现高质量物理3D资产批量生成的基础上,进一步探索了完整仿真场景的自动生成技术。
这一能力让机器人能够在虚拟世界中预演各种真实场景的交互任务,不断积累物理经验,逐步形成类人的物理直觉。
未来,PhysX-Omni有望成为机器人最强大脑的“世界模拟器”重要一环,助力具身智能向通用人工智能迈出关键一步。
构筑全球首个统一物理3D生成框架
PhysX-Omni的发布,首次实现刚体、可形变物体与关节物体的一体化建模,能同时生成绝对尺度、材料属性、运动学参数、交互能力等核心物理信息,让AI生成的3D模型真正做到 “生成即可仿真”。
该框架的核心突破在于首创面向视觉语言模型的模板化RLE几何表征.受经典二维游程编码启发,先将3D资产体素化并按部件层级拆分,再沿Z 轴切分为二维二值掩码进行紧凑编码;同时引入模板层概念,让结构相似的切片共享基础模板、仅记录残差变化,既保留了精细几何信息,又大幅压缩了token数量,从而避免了引入分割步骤带来的误差。
PhysX-Omni彻底打破了传统3D AIGC“重外观、轻物理” 的行业瓶颈。此前绝大多数 3D 生成方法仅能输出静态几何与视觉效果,无法还原真实世界的物理属性与运动规律,生成的模型一进入仿真场景就会出现穿模、尺寸错乱、关节失效等问题,完全无法支撑物理交互与机器人训练需求。
构建首个通用仿真就绪物理3D数据集 PhysXVerse
PhysXVerse 是全球首个通用仿真就绪物理3D数据集,解决了物理 AI 与具身智能领域长期面临的高质量物理3D数据稀缺难题。此前行业内的 3D数据集大多仅包含几何结构与外观信息,缺乏真实物理属性标注,导致训练出的模型生成的资产无法直接用于物理仿真,严重制约了机器人交互与策略学习的发展。
该数据集基于PartVerse经过人类验证的部件分割结果,通过人在环的精细化物理标注流程构建而成,最终包含8.7K+高质量仿真就绪 3D 资产,覆盖2.9K+类别,全面涵盖室内家具、无人机、机器人、车辆以及大型场景组件等多种复杂对象。
与现有数据集相比,PhysXVerse 不仅保留了精细的几何与视觉信息,更完整标注了绝对尺度、材料参数、运动学结构与交互可供性等核心物理属性,为物理 3D 生成模型的训练提供了标准化的高质量数据基础,加速了3D生成从“视觉可用”向“物理可用”的跨越。
打造首个物理 3D 生成基准评测集 PhysX-Bench
PhysX-Bench 是全球首个物理3D生成统一基准评测集,终结了物理3D 生成领域长期缺乏标准化、可量化评测体系的行业困境。
该评测集基于开源视觉语言模型 Qwen3.5 与物理仿真引擎构建,创新性地采用无真值评测模式,通过渲染图像与仿真视频完成评估,更贴近人类感知与机器人应用需求。它从几何结构、绝对尺度、材料属性、交互可供性、运动学一致性、语义描述六大核心维度建立全面评价体系,通过自由落体、水中下落等物理实验间接验证材料参数,通过运动视频分析关节运动合理性。
PhysX-Bench 为不同物理 3D 生成方法提供了公平的横向对比平台,能够精准量化生成资产的物理真实性与仿真可用性,为物理 AI 与具身智能技术的迭代升级提供了统一的评判标尺。
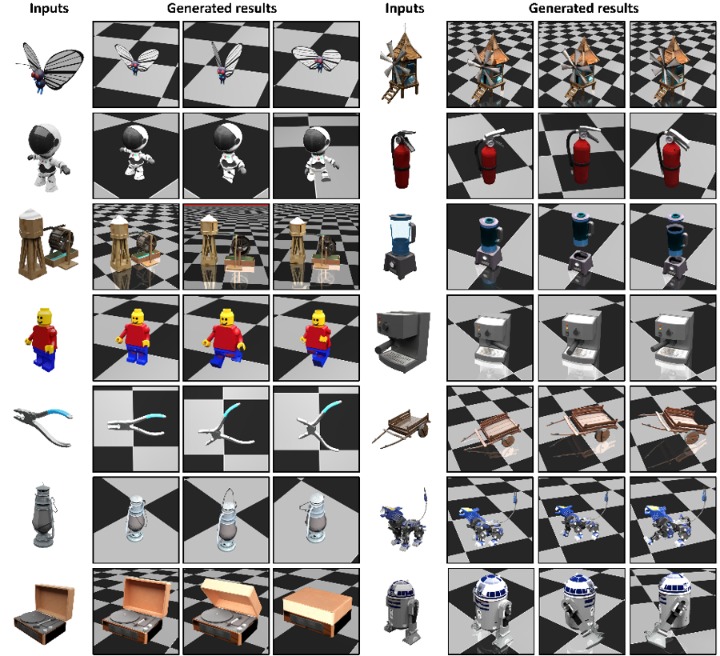
在PhysX-Bench 真实场景评测中,其在复杂类别与野外挑战案例中表现出更强鲁棒性。落地验证表明,PhysX-Omni 生成的 3D 资产可直接部署至物理模拟器,支撑机器人开关柜门、操作咖啡机等交互任务与策略学习,同时具备场景级仿真生成能力,为具身智能规模化训练奠定了基础。
创造具身智能的世界基建,为通用物理世界建模铺平道路
PhysX-Omni通过统一物理3D生成技术,实现了从文本描述到可直接仿真的物理资产的端到端生成,为具身智能提供了规模化、低成本的训练数据解决方案。
PhysX-Omni 可批量生成具备真实物理属性的各类物体与机器人模型,无需人工标注与二次调试,大幅降低训练数据的获取成本。其生成的资产物理参数与真实世界高度一致,有效提升了机器人策略在真实场景中的泛化能力。
除单个物体外,PhysX-Omni 支持从 2D 图像或文本描述生成完整的仿真就绪场景,可快速搭建家居、工业、办公等多样化交互环境,满足机器人导航、操作、协作等复杂任务的训练需求。
生成的3D资产可直接导入主流物理模拟器,支撑机器人开关柜门、操作咖啡机等真实交互任务的训练与验证,显著缩短了具身智能系统从研发到落地的周期。
在训练环境与世界建模层面,该团队进一步突破了单一物体生成的局限,与现有方法组合使其具备场景级仿真就绪生成能力。通过3D布局与可交互物体结合来构建符合真实物理规律的完整室内外场景,为机器人导航、多智能体协作、复杂环境交互等高阶任务提供了多样化的训练环境,同时也为具身智能构建对物理世界的全局认知、实现通用世界建模奠定了重要基础。
